如何一步步地实现各种深度的 ResNet
ResNet 通过建立短路连接,实现了一般神经网络难以模拟的恒等映射,其常用的具体架构一般有 resnet18,resnet34,resnet50,resnet101 和 resnet152 这五种,本文将从代码层面详细分析如何搭建这些结构。
首先,从最粗略的层面来看,各种 resnet 都有一个大致相同的结构,可以说是骨架中的骨架,即(conv -> bn -> relu -> maxpool -> 4 x res_layer),其简化代码如下
class ResNet(nn.Module):
def __init__(self):
self.conv1 = nn.Conv2d()
self.bn1 = nn.BatchNorm2d()
self.relu = nn.ReLU()
self.maxpool = nn.MaxPool2d()
self.layer1 = res_layer()
self.layer2 = res_layer()
self.layer3 = res_layer()
self.layer4 = res_layer()
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
return x
通过调节各个 res layer 的残差块数量, 就可以实现不同深度的版本. 比如常用的 resnet 分布如下表所示
| layer1 | layer2 | layer3 | layer4 | |
|---|---|---|---|---|
| resnet18 | 2 | 2 | 2 | 2 |
| resnet34 | 3 | 4 | 6 | 3 |
| resnet50 | 3 | 4 | 6 | 3 |
| resnet101 | 3 | 4 | 23 | 3 |
| resnet152 | 3 | 8 | 36 | 3 |
而残差块又分为两种类型, 即 basic block 和 bottleneck block, 其结构参考下图所示
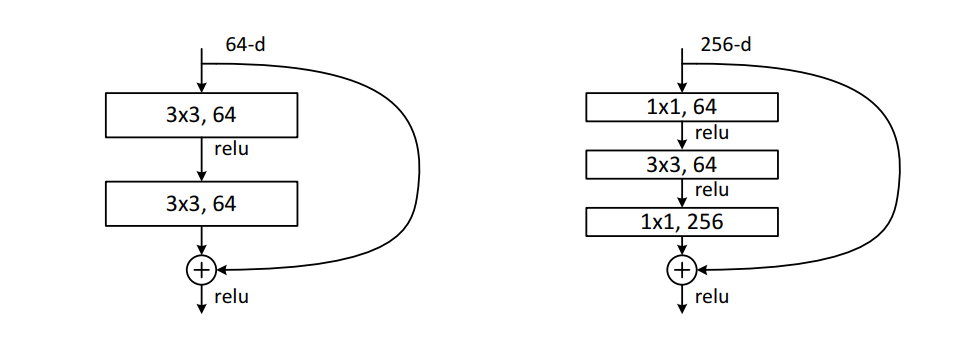
其中 basic block 由两个核大小相同的卷积层组成, 而 bottleneck block 则有 3 个卷积层, 其中第一层和第三层为 1 by 1 卷积. 另一个重要的区别是 basic block 两个卷积层的输出通道相同, 而 bottleneck block 的最后一层输出通道是前一层输出通道的 4 倍.
我们首先来看 basic block 的简化代码
class BasicBlock(nn.Module):
def __init__(self, in_channels, out_channels):
self.conv1 = conv3x3(in_channels, out_channels)
self.bn1 = nn.BatchNorm2d()
self.relu = nn.ReLU()
self.conv2 = conv3x3(out_channels, out_channels)
self.bn2 = nn.BatchNorm2d()
if in_channels == out_channels:
self.shortcut=nn.Sequential(
nn.Conv2d(out_channels, out_channels),
nn.BatchNorm2d()
)
def forward(self, x):
identity = x
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.conv2(x)
x = self.bn2(x)
if self.shortcut:
identity = self.shortcut(identity)
x = x + identity
x = self.relu(x)
return x
在这里, 由于输入通道数可能和输出通道数不同, 所以利用 shortcut 层将输入张量的维度变换到卷积层的输出维度, 以便实现两者相加。
bottleneck block 的实现也大同小异, 只不过需要注意最后一层的通道扩展
class Bottleneck(nn.Module):
expansion = 4 ## 最后一层的输出通道扩展倍数
def __init__(self, in_channels, out_channels):
self.conv1 = conv1x1(in_channels, out_channels)
self.bn1 = nn.BatchNorm2d()
self.conv2 = conv3x3(out_channels, out_channels)
self.bn2 = nn.BatchNorm2d()
self.conv3 = conv1x1(out_channels, out_channels * self.expansion)
self.bn3 = nn.BatchNorm2d()
self.relu = nn.ReLU()
if in_channels != out_channenls * self.expansion
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, out_channels * self.expansion),
nn.BatchNorm2d(out_channels * self.expansion)
)
def forward(self, x):
identity = x
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.conv2(x)
x = self.bn2(x)
x = self.relu(x)
x = self.conv3(x)
x = self.bn3(x)
if self.shortcut:
identity = self.shortcut(x)
x = x + identity
x = self.relu(x)
return x
根据原论文中的叙述, basic block 一般作为 resnet18 和 resnet34 的残差块, 其他架构使用 bottleneck block. 所以在 resnet18 和 resnet34 中,定义 res_layer 函数如下
def res_layer(in_channel, out_channel, num_layers):
layers = []
for _ in range(num_layers):
layer=BasicBlock(in_channel, out_channel)
layers.append(block)
in_channel = out_channel
return nn.Sequential(*layers)
在使用的时候,只需要注意前层的 out_channel 与后层的 in_channel 匹配就行了,比如
layer1 = res_layer(64, 64, 2)
layer2 = res_layer(64, 128, 2)
而其他 resnet 结构中,由于使用了 bottlenet block,所以需要考虑通道扩展的情况
def res_layer(in_channel, out_channel, num_layers):
layers = []
for _ in range(num_layers):
layer = Bottleneck(in_channel, out_channel)
layers.append(layer)
in_channel = 4 * out_channel
return nn.Sequential(*layers)
layers1 = res_layer(64, 64, 3)
in_channel = 64 * 4
layers2 = res_layer(in_channel, 128, 4)
稍加修改,上面定义的两个 res_layer 可以统一成一个函数
def res_layer(block, in_channel, out_channel, num_layers):
layers = []
for _ in range(len(num_layers)):
layer = block(in_channel, out_channel)
layers.append(layer)
in_channel = block.expansion * out_channel
return nn.Sequential(*layers)
这里使用了 block.expansion 来引用通道扩展系数,对于 BasicBlock 来说,其 expansion 等于 1。
如果我们查看 torchvision.model 自带的 resnet 结构,会一时看不出来它们各层的 res layer 的 in_channel 和 out_channel 有何规律,实际上,它们是有一定规则的,如下图所示
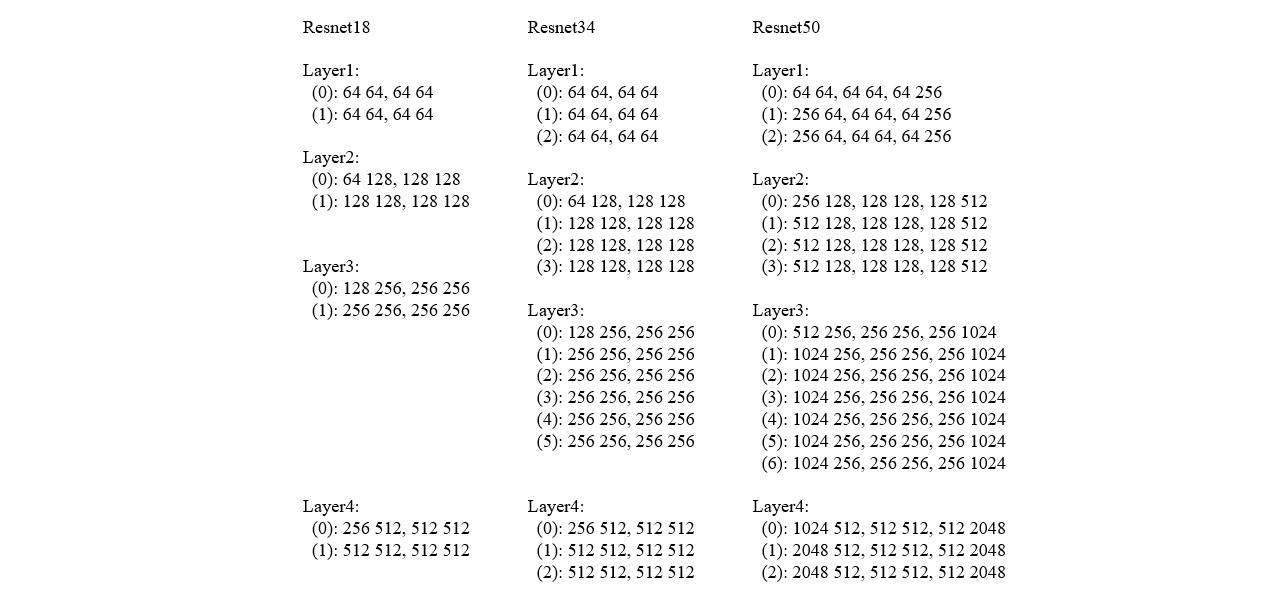
可以发现具体的规则很简单
- in_channel 从 64 开始;
- 每个 layer 的第一个 block 的 out_channel 依次为 64,128,256,512;
- 后层 in_channel 等于前层 out_channel。
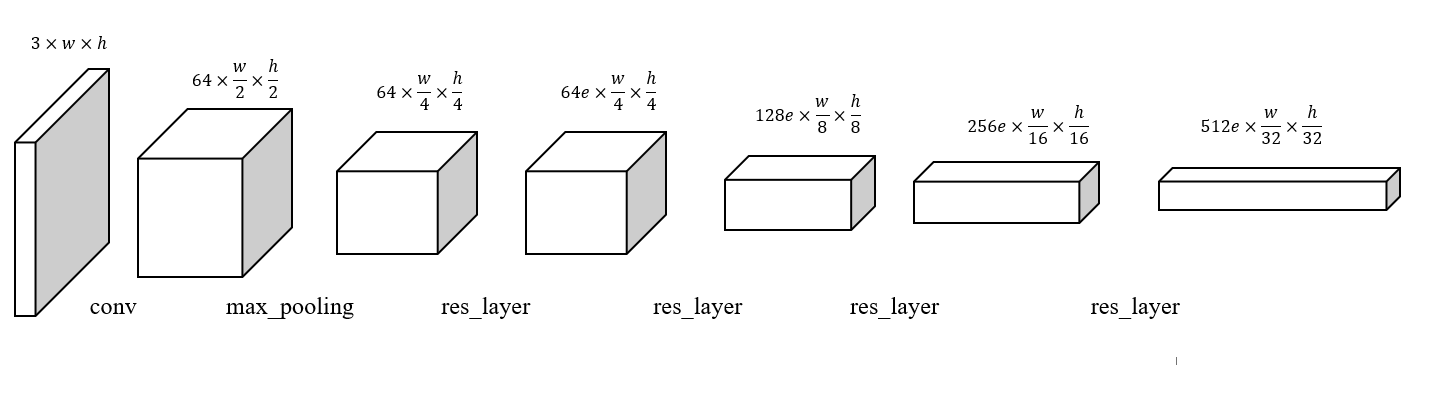
以上的讨论为了不搞得太复杂,只涉及到了卷积网络的输入输出通道,丝毫没有提及 kernel_size, stride, padding 等量,也就是说特征图的尺寸变化规律。我们这里可以先抛出结果
- 第一个卷积层使图片尺寸减半;
- 第一个池化层使图片尺寸减半;
- 对于 res_layer,如果输入输出通道一样,则不改变特征图尺寸,否则特征图尺寸减半。
总的来说,各个阶段的特征图尺寸如下所示 (其中的 e 代表 expansion)
特征图尺寸的参数由 kernel_size, stride 和 padding 来控制,根据公式
\[M = \frac {N + 2 p - k}{s} + 1\]当 \(M = N\),即特征图尺寸不变时,可以有 \(k = 3, p = 1, s = 1\),当 \(M = \frac N 2\) 时,可以有 \(k = 3, p = 1, s = 2\)。
对于 basic block 来说,它有两个 3x3 卷积层,只需要在第一个卷积层控制特征图尺寸变化,第二个卷积层不改变通道数和特征图尺寸
class BasicBlock(torch.nn.Module):
def __init__(self, in_channels, out_channels, stride=1):
super(BasicBlock, self).__init__()
self.conv1=torch.nn.Conv2d(in_channels, out_channels, kernel_size =3, stride=stride, padding=1)
self.bn1=torch.nn.BatchNorm2d(out_channels)
self.relu=torch.nn.ReLU()
self.conv2=torch.nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1)
self.bn2=torch.nn.BatchNorm2d(out_channels)
if in_channels != out_channels:
self.shortcut = torch.nn.Sequential(
torch.nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride, padding=0),
torch.nn.BatchNorm2d(out_channels)
)
else:
self.shortcut = None
这里我们额外增加了一个参数 stride,它作用于第一个卷积层和 shortcut 连接(如果需要的话)。当 stride 参数等于 2 的时候,第一个卷积层将令特征图尺寸减半,这时,如果需要 shortcut 连接,则它必须将输入特征图的尺寸变换到第二个卷积层的输出大小,也必然要求 stride=2,所以这里需要统一控制。
而对于 bottleneck block 来说,它用第二个卷积层来改变特征图大小
class Bottleneck(torch.nn.Module):
expansion = 4
def __init__(self, in_channels, out_channels, stride):
super(Bottleneck, self).__init__()
self.conv1 = torch.nn.Conv2d(in_channels, out_channels, kernel_size = 1, stride=1)
self.bn1 = torch.nn.BatchNorm2d(out_channels)
self.conv2 = torch.nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=stride, padding=1)
self.bn2 = torch.nn.BatchNorm2d(out_channels)
self.conv3 = torch.nn.Conv2d(out_channels, out_channels * self.expansion, kernel_size=1, stride=1)
self.bn3 = torch.nn.BatchNorm2d(out_channels * self.expansion)
self.relu = torch.nn.ReLU()
if in_channels != out_channels * self.expansion:
self.shortcut = torch.nn.Sequential(
torch.nn.Conv2d(in_channels, out_channels * self.expansion, kernel_size=1, stride=stride),
torch.nn.BatchNorm2(out_channels * self.expansion)
)
else:
self.shortcut = None
同 basic block 一样,shortcut 连接层的 stride 由参数控制,与中间卷积层保持一致。
有了 BasicBlock 和 Bottleneck 的完整定义后,我们就可以完成 res_layer 的编写了。res_layer 由多个 Block 组成,我们使用第一个 Block 来实现特征图尺寸的变化,因此后续 Block 的 stride 均为 1。之所以将 stride 作为参数传入,是因为是否让第一个 block 将特征图尺寸减半由上层代码来确定
def res_layer(block, in_channels, out_channels, num_layer, stride):
layers = []
layers.append(
block(in_channels, out_channels, stride=stride)
)
in_channels = out_channels * block.expansion
for _ in range(1, len(num_layer)):
layer = block(in_channels, out_channels, stride=1)
layers.append(layer)
in_channels = block.expansion * out_channels
return nn.Sequential(*layers)
最后,我们便可以补全各种深度的 ResNet 了
class ResNet18(nn.Module):
def __init__(self):
super(ResNet18, self).__init__()
self.conv1 = torch.nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = torch.nn.BatchNorm2d(64)
self.relu = torch.nn.ReLU()
self.maxpool = torch.nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1=res_layer(BasicBlock, 64, 64, num_layer=2, stride=1) ## 第一个 block 不改变特征图尺寸
self.layer2=res_layer(BasicBlock, 64, 128, num_layer=2, stride=2)
self.layer3=res_layer(BasicBlock, 128, 256, num_layer=2, stride=2)
self.layer4=res_layer(BasicBlock, 256, 512, num_layer=2, stride=2)
class ResNet50(nn.Module):
def __init__(self):
super(ResNet50, self).__init__()
self.conv1 = torch.nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = torch.nn.BatchNorm2d(64)
self.relu = torch.nn.ReLU()
self.maxpool = torch.nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1=res_layer(Bottleneck, 64, 64, num_layer=2, stride=1) ## 第一个 block 不改变特征图尺寸
self.layer2=res_layer(Bottleneck, 64 * 4, 128, num_layer=2, stride=2)
self.layer3=res_layer(Bottleneck, 128 * 4, 256, num_layer=2, stride=2)
self.layer4=res_layer(Bottleneck, 256 * 4, 512, num_layer=2, stride=2)
从上面的代码来看,不同深度的 ResNet 有很多重复的代码,因此我们可以让不同的部分用参数来表达
class ResNet(nn.Module):
def __init__(self, block, num_layers):
super(ResNet, self).__init__()
self.conv1 = torch.nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = torch.nn.BatchNorm2d(64)
self.relu = torch.nn.ReLU()
self.maxpool = torch.nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1=self._make_layer(block, 64, 64, num_layers[0], 1)
self.layer2=self._make_layer(block, 64 * block.expansion, 128, num_layers[1], 2)
self.layer3=self._make_layer(block, 128 * block.expansion, 256, num_layers[2], 2)
self.layer4=self._make_layer(block, 256 * block.expansion, 512, num_layers[3], 2)
这样一来,各种深度的 ResNet 创建方法可以简化为
def resnet18():
return ResNet(BasicBlock, [2,2,2,2])
def resnet34():
return ResNet(BasicBlock, [3, 4, 6, 3])
def resnet50():
return ResNet(Bottleneck, [3, 4, 6, 3])
def resnet101():
return ResNet(Bottleneck, [3, 4, 23, 3])
def resnet152():
return ResNet(Bottleneck, [3, 8, 36, 3])
当然,我们可以根据实际情况调整各层 res_layer 的 block 数量从而实现其他深度的 ResNet,原论文中一千多层的神经网络就是这么来的,而残差层的结构保证了它在极深的情况下不会出现严重的退化问题。
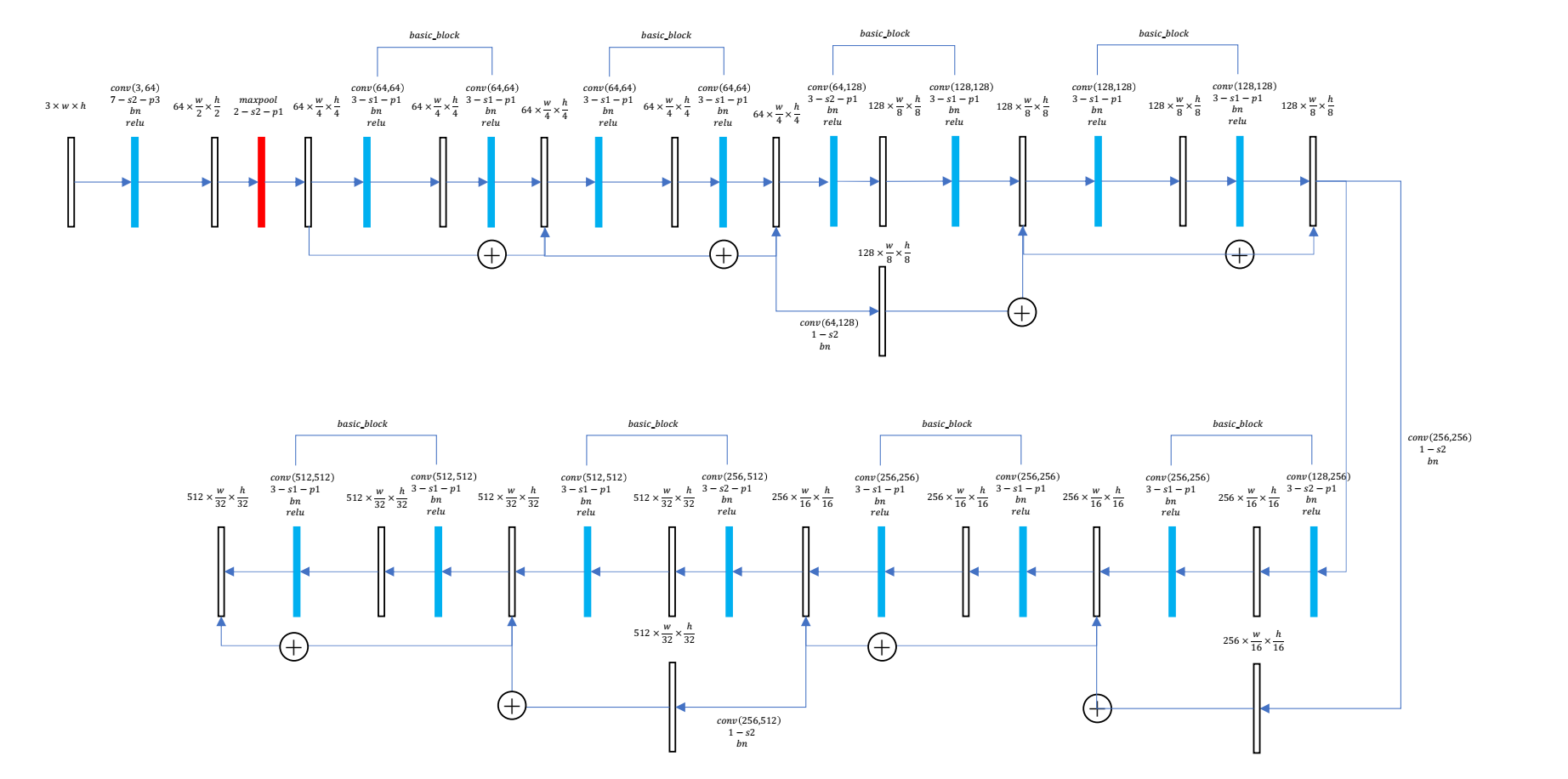
最后,附一张 ResNet-18 的详细结构图,其中白色框是特征图张量,红色框是池化层,蓝色框是卷积层,可以看到这里有 17 个卷积层,再加上分类时的全连接层,共有 18 个卷积层,也许这就是 ResNet-18 的含义吧
声明:本文的代码实现参考了 torchvision 以及 detectron2 的 resnet 实现